Voila j’ai repris ce sujet concernant un bras de transmission
Bras de transmission
Ici volontairement j’ai choisi un problème modélisé car la maîtrise de la modélisation des liaisons est encore très balbutiante.
Le mapp ci-dessous vous donne une idée de l’ organisation de ce travail

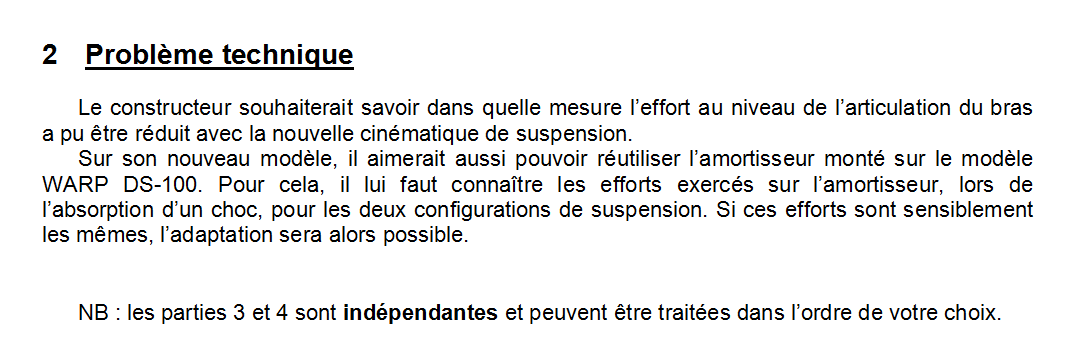
| Voici le thème étudié |  |
| Ici je respecte un plus la norme. |  |
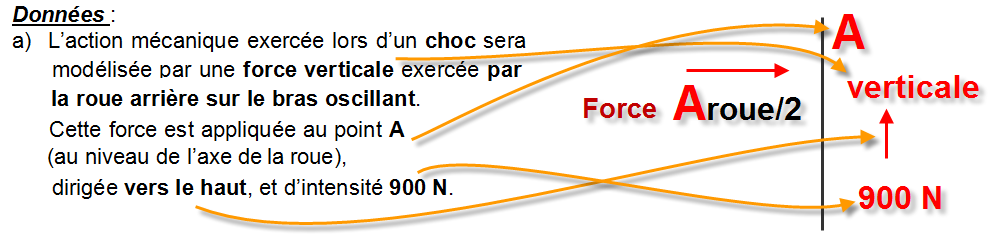
| Le texte a aussi son importance, car j’ai remarqué que vous aviez beaucoup de mal à vous approprier le texte et que ces informations étaient constamment négligées. |  |
| Voici l’ objectif final attendu. Compte tenu du prés requis de beaucoup parmi vous je vous conseil impérativement d’ atteindre celui du B.A.M.E. |
 |
| Voici les étapes qu’ il faut suivre pour faire du bon travail. |  |
ISOLER
| « Isoler » consiste comme l’indique cette étape à isoler une partie du mécanisme. on peut considérer également que l’on scinde le monde en deux parties, le système isolé et tout ce qui n’est pas le système isolé. |
 |
B.A.M.E.
| « B.A.M.E. » consiste à réaliser l’étape la plus importante, le bilan des actions mécaniques extérieures.Ici vous pouvez voir les trois étapes de construction d’un B.A.M.E.
La troisième à votre niveau est rarement utile, ce qui fait que vous l’oubliez et cela peut vous amener à l’erreur. |
 |
| « Le recensement » consiste à énumérer les actions.Prenez le temps de réaliser avec soin cette étape, car la moindre erreur à ce stade aura des répercussions importantes sur la suite du problème. Pensez à la théorie de » l’ effet papillon »L’ utilisation d’ un graphe des contacts peut être envisagé, pour ne rien oublier. |
 |
| « La description » consiste à définir les composantes de l’ action mécanique dans le repère propre à chaque action.Si vous parvenez à réaliser cette étape, eh bien vous aurez réaliser la part la plus difficile de l’ application du P.F.S |  |
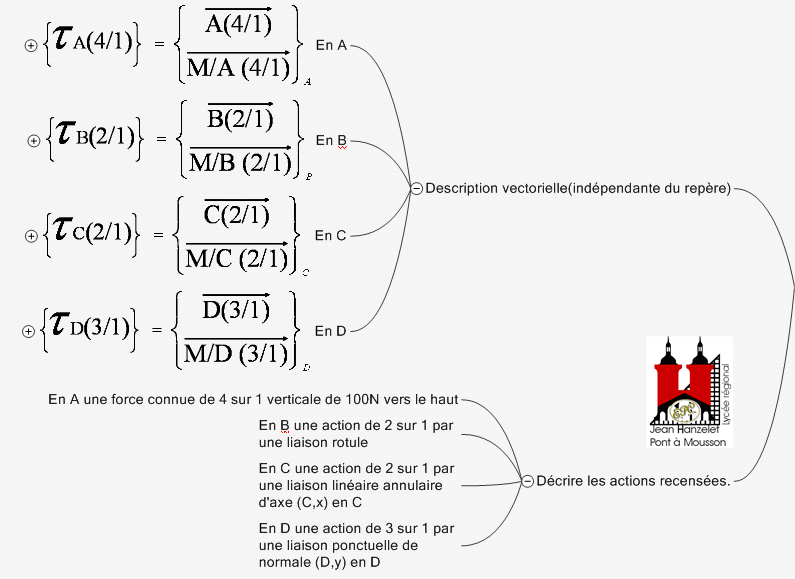 |
« La description vectorielle » de l’ action mécanique extérieure consiste à donner un nom à la résultante (force) et au moment de l’ action mécanique.Ici vous pouvez observer une étape, automatique que vous pourrez shunter plus tard, car elle deviendra sous entendu. |
| Ici je vous propose de vous expliquer comment anticiper la composition vectorielle en fonction des données du problème.Rares sont ceux qui sont capables de faire ce que je vous montre là.
Ici observez ce qu’implique la notion de force ou de glisseur. |
 |
| Ici, observez la composition vectorielle du torseur transmissible par une liaison rotule. |  |
| Ici, observez la composition vectorielle du torseur transmissible par une liaison linéaire annulaire. |  |
| Ici, observez la composition vectorielle du torseur transmissible par une liaison ponctuelle. |  |
P.F.S.
| « P.F.S. » Principe fondamental de la statiqueIci, observez les trois étapes pour appliquer ce principe |  |
 |
« Le théorème de la résultante statique » après le bilan tombe tout seul |
 |
« Les calculs de moment » sont vos préoccupations principales alors que ce n’est qu’une procédure automatique qu’un ordinateur peut très bien faire à votre place. |
 |
« Le théorème du moment statique » après les calculs de moment est une formalité automatique également. |
| « Résolution des équations »consiste à résoudre mathématiquement un système d’ équations.C’ est une étape purement mathématique. |  |
| Analyse des résultats »consiste à observer ceux ci pour voir la crédibilité de ceux-ci.Et pour cela il n’ est pas inintéressant d’ effectuer une vérification. |  |
Vérification
| « Vérifier » consiste comme l’ indique cette étape à procéder par un moyen rapide à une validation approximative des résultats. | 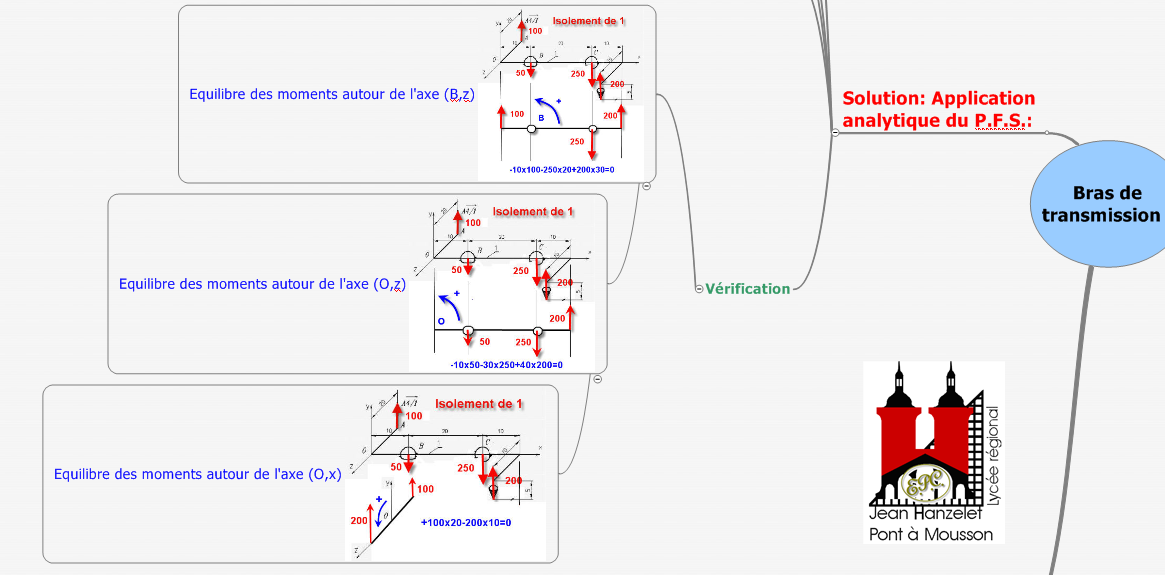 |
| Se faire une petite figure et mettre en place les forces connues.permet rapidement de vérifier le théorème de la résultante statique. |  |
| Utiliser les bras de levier pour rapidement effectuer l’ équilibre des moments autour d’ un axe particulier, ici c’ est (B,z) |  |
| Utiliser les bras de levier pour rapidement effectuer l’ équilibre des moments autour d’ un axe particulier, ici c’ est (O,z) |  |
| Utiliser les bras de levier pour rapidement effectuer l’ équilibre des moments autour d’ un axe particulier, ici c’ est (O,x) |  |
voila j’ai repris ce sujet, en approfondissant les explications
si vous désirez vous le procurer sous le format kindle ![]() pour lecture sur tablette ou bien alors en simple format pdf alors cliquez sur le caddy
pour lecture sur tablette ou bien alors en simple format pdf alors cliquez sur le caddy